DiffusionModel
INTRODUCTION
Divided into part procession , Diffusion Model has a “Forward Process” and a “Reverse Process”.
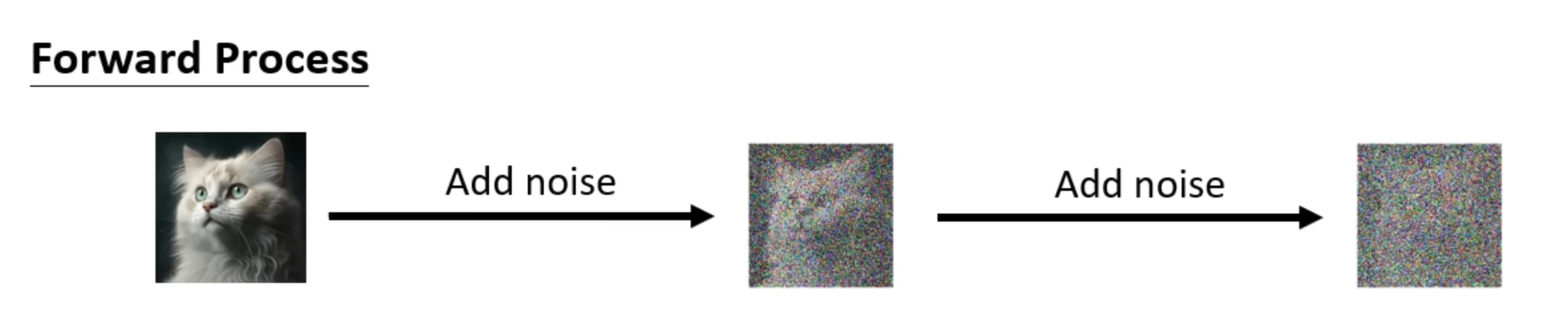
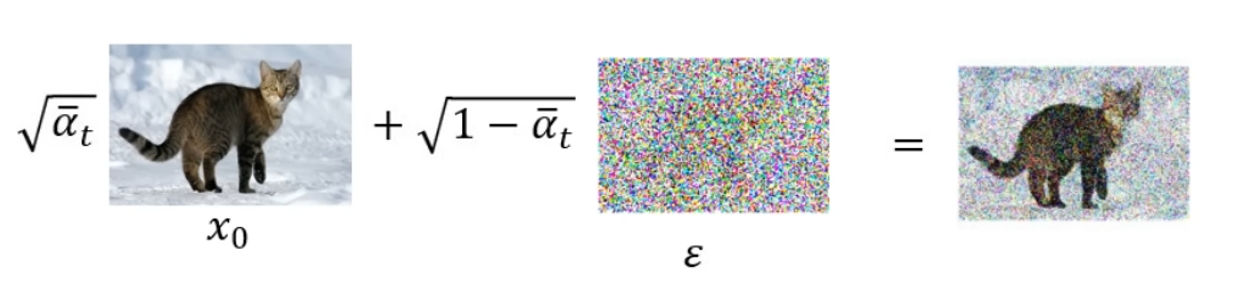
Forward Process
Continuously adding noise into a image
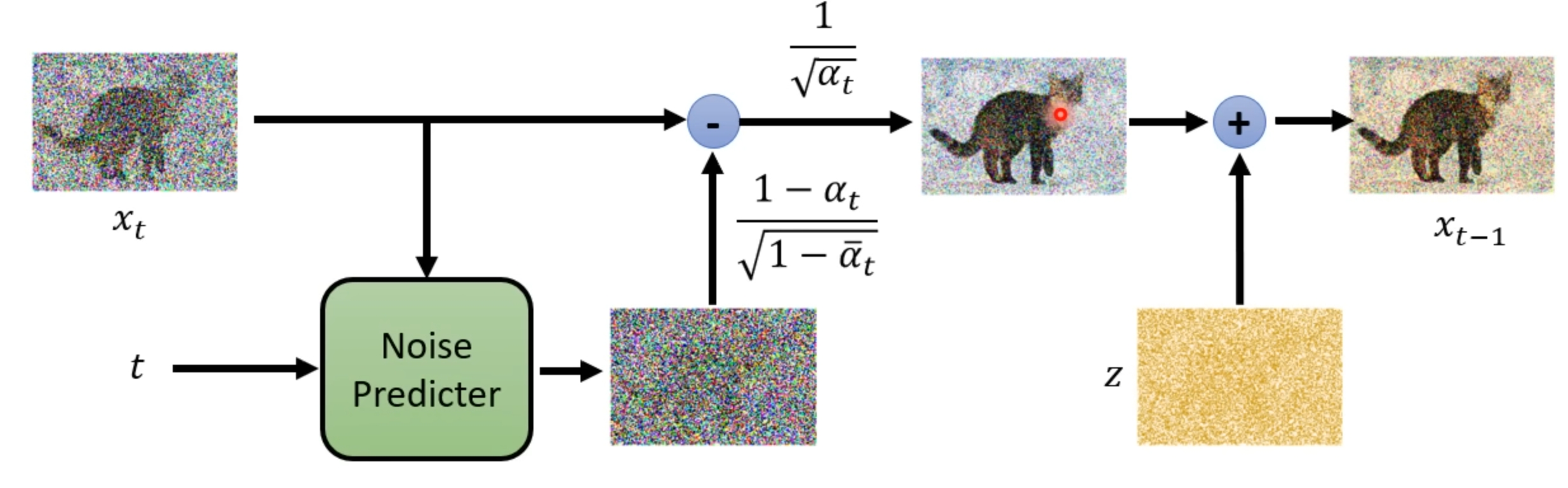
Reverse Process
Continuously denoise the image that filled with noise by training a neural network

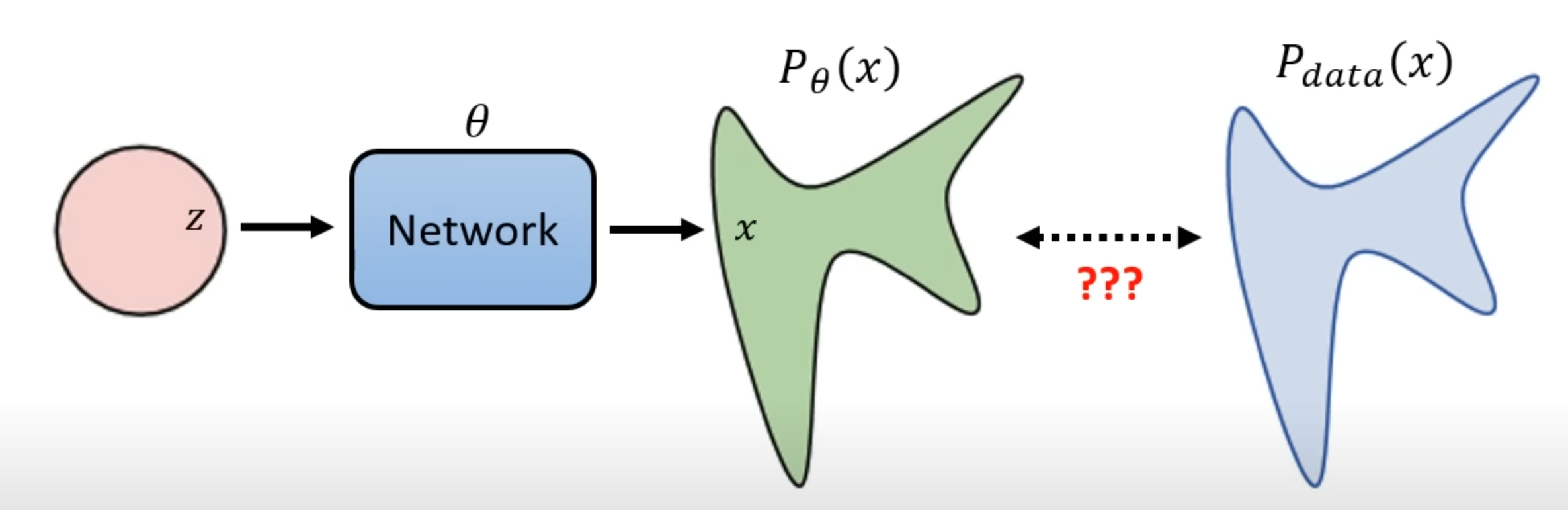
Objective
Then we could use the trained network to produce a new picture from a random noise-distribution image
VAE vs. Diffusion Model
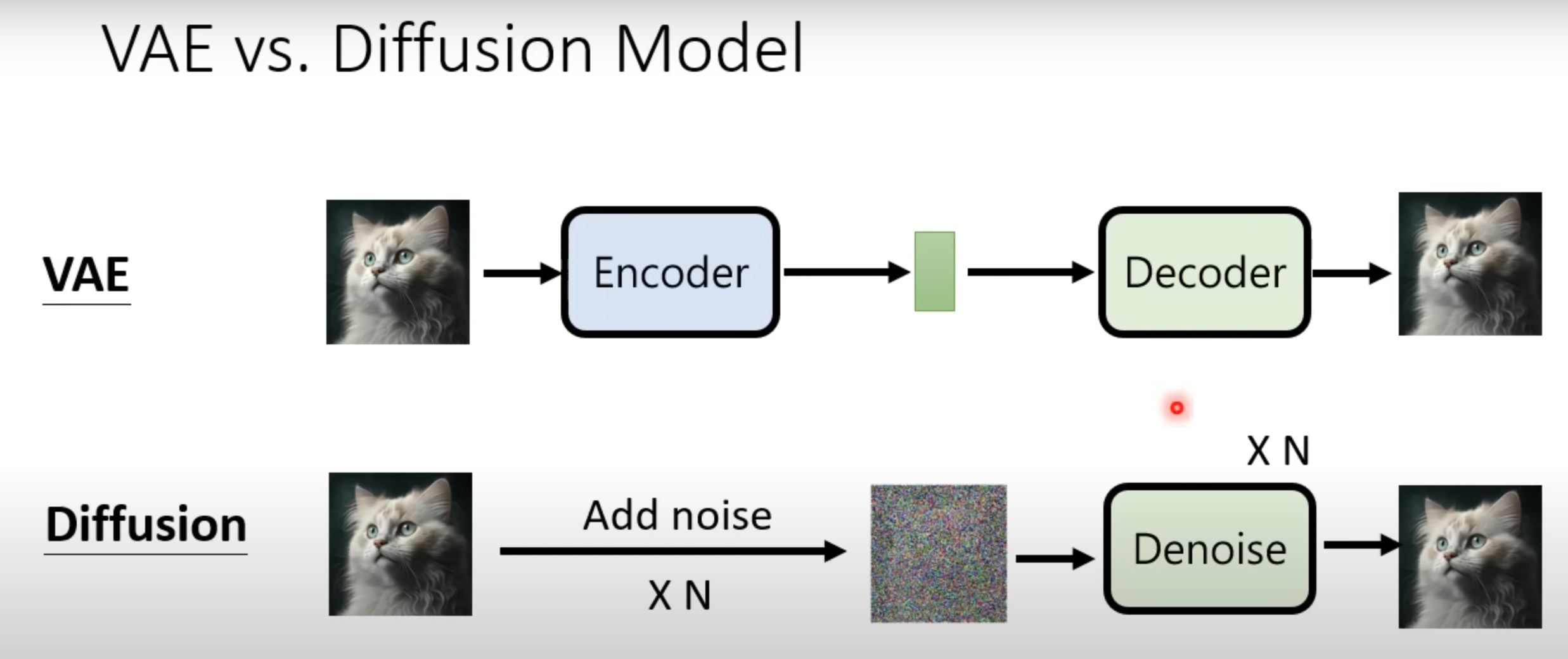
The bottleneck part or the CODE in the VAE model is quite like the picture after adding noise N times
Training Algorithm
Take gradient descent step on
In Diffusion Model
tips:
Sampling
Algorithm
Maximum Likelihood Estimation
we sample {
So how we can compute the
We want to find a
So maximum likelihood estimation is to minimum the KL divergence(like VAE)
By the way,