引入
在之前我们对图像进行卷积操作时,例如检测边界
(0与1的边界)
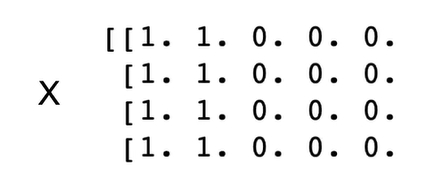
用[0,-1]卷积核对图像进行卷积操作时候,会发现一旦得到的边界只有一列,这对于日常处理图片的时候,边界过小,在图像平移or模糊的情况下,不是很好得到有明显边界的矩阵
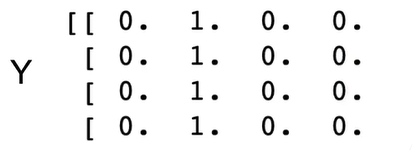
所以池化层就是为了解决卷积核过于敏感的问题,使得卷积操作的容错率上升
如上图,通过池化层处理后的卷积,图像边缘检测的范围增大了。
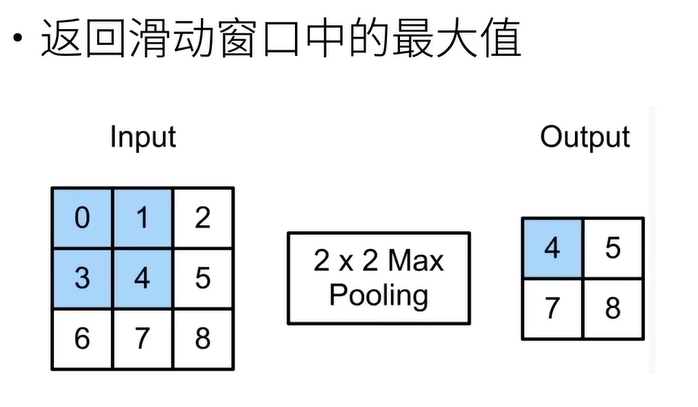
二维最大池化
平均池化层
把取最大值改成了取平均值而已
代码实现
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
| import torch
from torch import nn
from d2l import torch as d2l
def pool2d(X,pool_size,mode='max'):
p_h,p_w = pool_size
Y = torch.zeros((X.shape[0] - p_h + 1, X.shape[1] - p_w + 1))
for i in range(Y.shape[0]):
for j in range(Y.shape[1]):
if mode == 'max':
Y[i,j] = X[i:i + p_h, j:j + p_w].max()
elif mode == 'avg':
Y[i,j] = X[i:i + p_h, j:j + p_w].mean()
return Y
#验证最大池化层与平均池化层的效果
X = torch.tensor([[0.0, 1.0, 2.0], [3.0, 4.0, 5.0], [6.0, 7.0, 8.0]])
print(pool2d(X,(2,2)))
print(pool2d(X,(2,2),'avg'))
|
Pytorch框架步幅与池化窗口的大小相同1
2
3
4
5
| #填充与步幅
X = torch.arange(16, dtype=torch.float32).reshape((1, 1, 4, 4))
print(X)
pool2d = nn.MaxPool2d(3)
print(pool2d(X))
|